- iccarconf@outlook.com
- Ticket to ICCAR 2026
ICCAR 2020
ICCAR 2020 | Singapore (Virtual Conference) | April 20-23
Conference Proceedings (IEEE Xplore) (CPCI, Ei Compendex and Scopus)
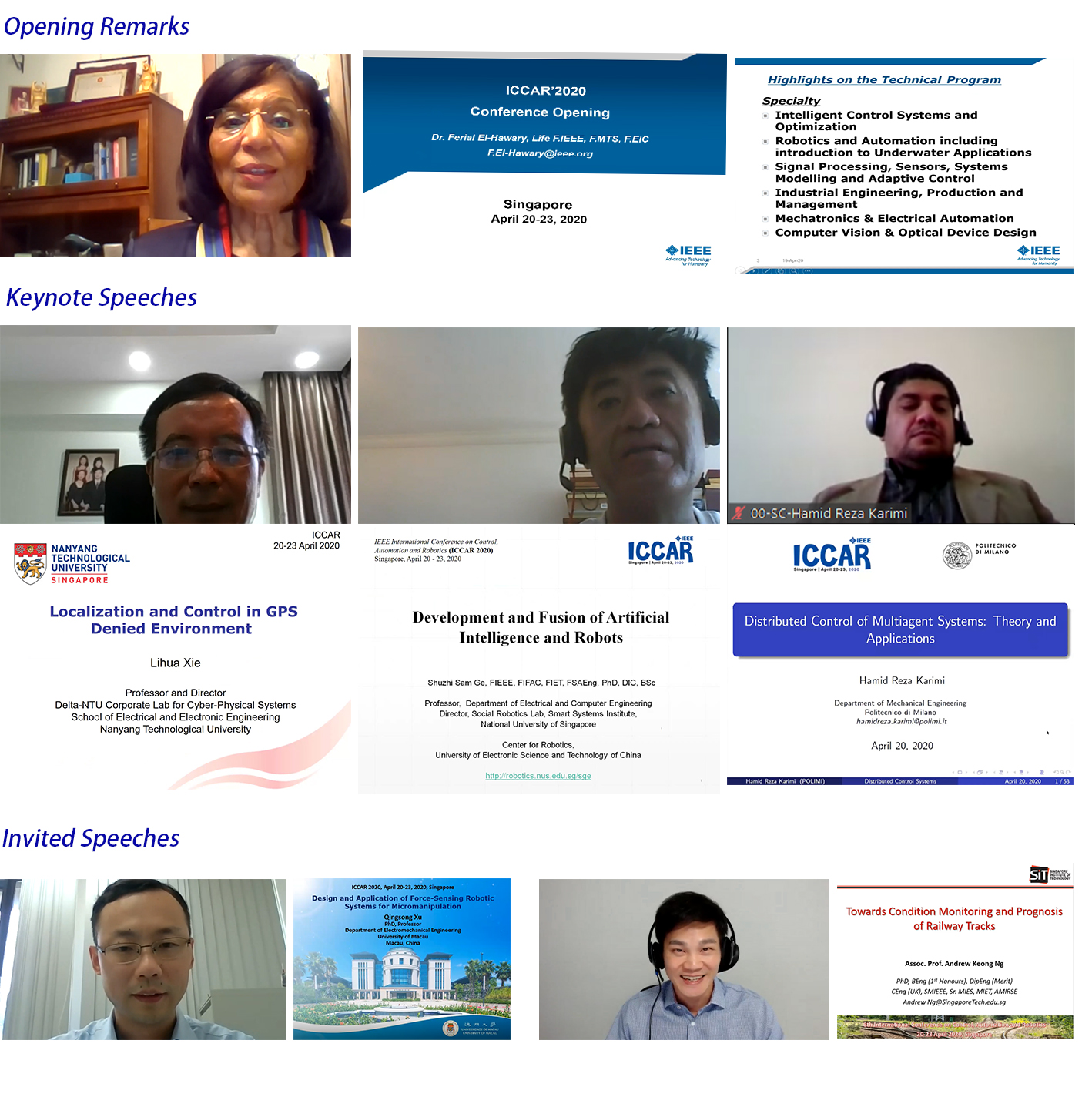
Opening & Keynote Speeches
During early 2020, many countries and regions has been going through a hard time due to the outbreak of COVID-19. Due to this reason, 2020 The 6th International Conference on Control, Automation and Robotics has been converted to a virtual conference.
The below are the distinguished guests participating on the morning of April 20, 2020 & April 21, 2020.
Group Photo

Tutorial Photos
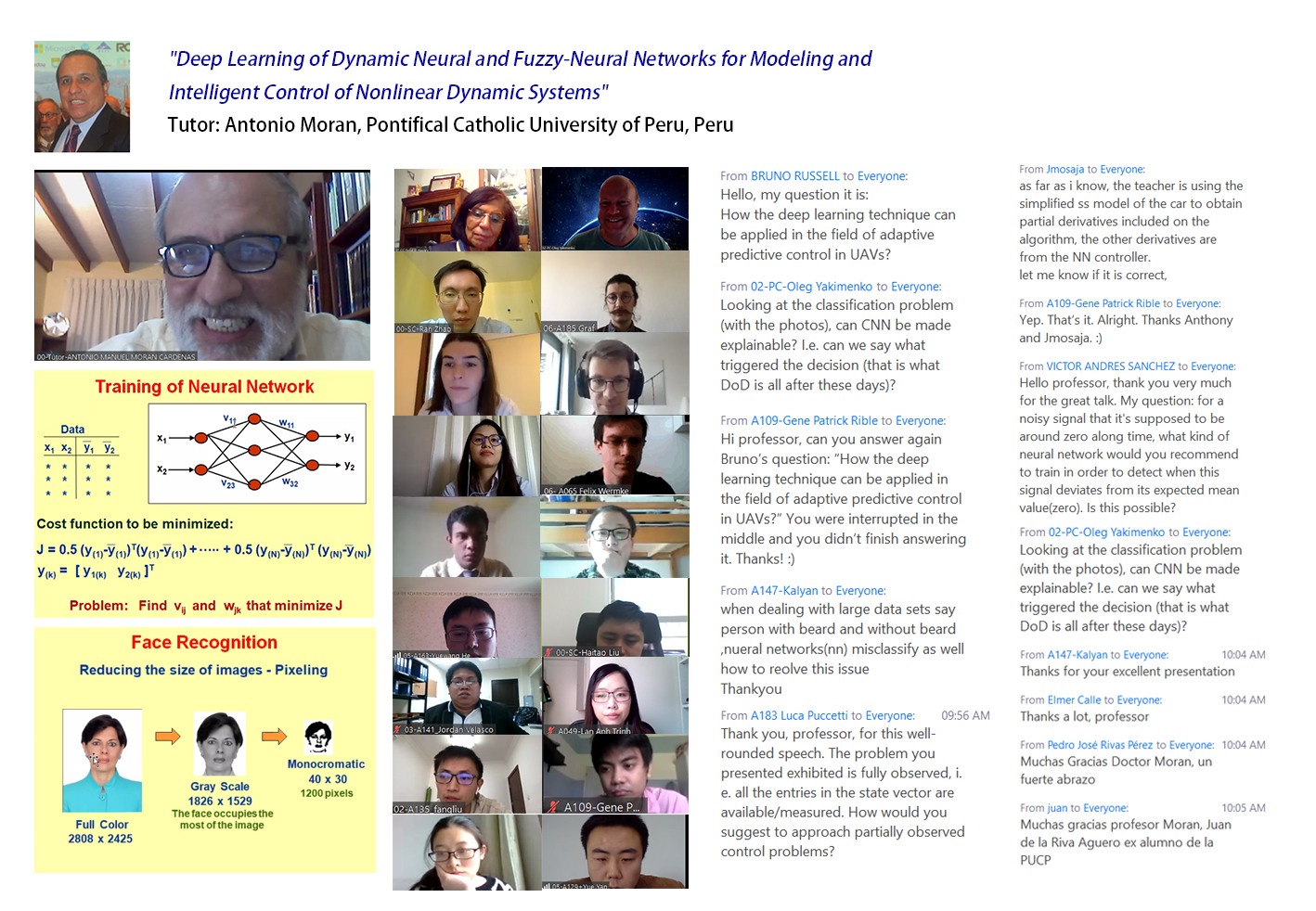
Academic Discussion
Winners of Best Presntation